



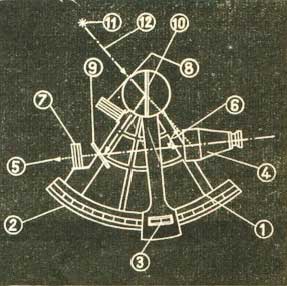
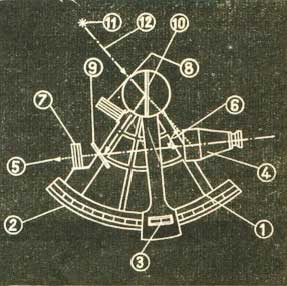
Nasiatce Merkatora przybywało coraz więcej nowych szczegółów nautycznych. Astrolabium, z nieudolnego kątomierza, zaopatrzonego w ciężarek zawieszony na nitce, stało się precyzyjnym instrumentem optycznym – sekstantem. Przyszedł wreszcie wiek dziewiętnasty. Wiek, pary i elektryczności, wiek stalowych okrętów i napędu mechanicznego. Podstawy nawigacji zostały te same, natomiast ludzkość otrzymała nowe, niespotykane dotychczas, możliwości techniczne.

Zchwilą pojawienia się na morzach okrętu stalowego, kompas magnetyczny znalazł się w zmienionych warunkach. Żelazo okrętowe, działając jako magnes, zaczęło zakłócać jego wskazania. Igła magnetyczna zaczęła odchylać się znacznie od południka magnetycznego. Rzecz tę trzeba było zbadać i złu zaradzić. Stworzono całą naukę o odchylaniu się igły od południka magnetycznego – czyli dewiację. Nauczono się zmniejszać wpływ żelaza okrętowego na kompas, czyli kompensować dewiację. Sędziwy towarzysz żeglarzy – kompas magnetyczny, otrzymał szereg dodatków i przybudówek. Były to urządzenia kompensacyjne. Zjawiły się po obu jego bokach kule żelazne, redukujące wpływ na igłę miękkiego żelaza.
Wraz z pojawieniem się na morzu maszyn służących do napędu, także i nawigacja zaczęła ulegać mechanizacji.
Jakinni, tak i ludzie morza starali się, aby mechanizm zastąpił pracę człowieka. Zaczynają się więc pojawiać przyrządy nawigacyjne – mechaniczne. Jednym z nich był i jest dotychczas, log mechaniczny. Węzły na loglinie znikły. Zamiast deski umocowanej na końcu liny, zastosowano wiatrak, a raczej śrubę metalową, która pod wpływem szybkości obraca się w wodzie i obroty swe, proporcjonalne do szybkości, przekazuje po linie do licznika umieszczonego na burcie. Licznik rejestruje przebytą drogę w milach morskich i kablach.
Sonda ręczna, która była bardzo dobra w swoim czasie, obecnie, przy zwiększonej szybkości i wielkości statków okazywała się niewystarczająca. Pojawiły się sondy mechaniczne. które można było później używać w ruchu i na większych niż dotąd głębokościach.
Nastąpił wiek dwudziesty, w którym technika wkroczyła na tory niemal zawrotne.
Zastosowano na morzu radio. Oprócz tego, że umożliwiało ono doskonałą sygnalizację na odległość, dało możność sprawdzania czasu. Chronometr przestał być tabu okrętowym, przy którym chodziło się na palcach, a stał się, jak dziś to można bez większej przesady powiedzieć, zabytkiem muzealnym. Wiek dwudziesty, w którym poważnie zastanawiano się, czy nie da się człowieka całkowicie zastąpić maszyną, uczyni nas w tej dziedzinie bardzo wymagającymi.
Również nawigacji postawiono bardzo wysokie wymagania. Oprócz tego, że ma być ona bezpieczna. musi być także dokładna. Jeżeli ma być dokładna, to instrumenty, którymi się posługuje, powinny być nie tylko dokładne, ale wprost precyzyjne. Czy nie można by prowadzić nawigacji bez udziału człowieka? Oto wymagania i pytania, jakie postawił przed nawigacją wiek dwudziesty. Jednym z nowych instrumentów jest kompas żyroskopowy, albo jak mówimy inaczej – bąkowy.
Widać już z nazwy, że ten nowy kompas nie ma nic wspólnego z magnetyzmem. Jest on oparty na zjawisku wirującego bąka. Wykorzystana jest tu mianowicie zasada, że ciało szybko wirujące, zachowuje w przestrzeni stały kierunek osi wirowania. Jeśli natomiast przyłożyć do osi bąka jakąś siłę, to oś zmieni kierunek zawsze w ten sam sposób. W kompasie żyroskopowym zastosowano bąk wirujący w ten sposób, że związano go niejako z ruchem wirowym ziemi, przez ograniczenie stopnia swobody bąka. W płaszczyźnie horyzontalnej, osiągnięto w ten sposób to zjawisko, że oś wirującego bąka ustawia się wzdłuż linii północ–południe. Dodać należy, że obroty bąka muszą być szybkie, bo minimum kilkanaście tysięcy obrotów na minutę. Szybkość tę uzyskujemy za pomocą napędu elektrycznego.
Kompas żyroskopowy jest w rezultacie mechanizmem bardzo skomplikowanym i delikatnym, ale uniezależnia nas od magnetyzmu ziemskiego i okrętowego i związanych z nim niedociągnięć kompasu magnetycznego. Daje nam pewny kurs, obarczony jedynie małymi poprawkami.
Zobaczmy, co się stało z naszą poczciwą sondą ręczną.
Niema niestety nawet cienia podobieństwa między nowoczesną sondą i tym sędziwym przyrządem. Do sondowania zaprzągnięto zjawisko fizyczne rozchodzenia się głosu. Nie jest to wprawdzie głos w ścisłym znaczeniu tego słowa, ale w każdym razie fale dźwiękowe – tzw. ultradźwięki, których częstotliwość wykracza poza zakres słyszalny przez człowieka.
Sondy ultradźwiękowe opierają się na zasadzie, że dźwięk w wodzie rozchodzi się z szybkością stałą i wynosi w wodzie morskiej około 1500 m/sek. Zbudowano więc przyrząd, który wysyła w kierunku dna morskiego wiązkę dźwięków ponadsłyszalnych i odbiera ich odbite echo.
Nietrudno już zgadnąć, że głębokość w miejscu sondowania jest proporcjonalna do połowy czasu, jaki upływa między wysłaniem dźwięku i odebraniem jego echa.
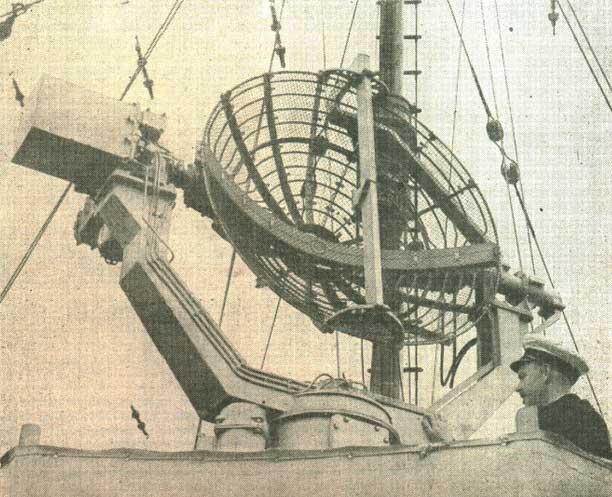
Antena radaru nawigacyjnego zainstalowana na pomoście dużego okrętu. Przyrząd ten jest głównym elementem współczesnej nawigacji.
Wspomnieliśmy już o tym, że wprowadzono na morzu radio. Natura człowieka ma to do siebie, że trudno się jej zadowolić rzeczami znanymi. Mało już było posiadania dokładnego czasu i doskonałej sygnalizacji na duże odległości. Zaczęto się zastanawiać, czy nie dałoby się bardziej wykorzystać radia do nawigacji.
Dla chcącego nie ma nic trudnego. Zastosowano radio do określania miejsca. Powstała cała dziedzina radionawigacji. Była to niewątpliwie pewna rewelacja.

Wykorzystano tu zjawisko, że fale elektromagnetyczne, popularnie zwane radiowymi, można wysyłać w dowolnych kierunkach, iak również można określić z jakiego kierunku one przychodzą. Osiąga się to przy pomocy anteny radiowej i odbiorników, Które pozwalają określić kierunek nadchodzących impulsów na podstawie maksymalnej lub minimalnej słyszalności w zależności od ustawienia anteny ramowej.
Jakjuż wspomnieliśmy powstał cały system radionawigacji. Powstały radiolatarnie morskie rozmaitych typów. Używa się je w ten sposób, że albo statek za pomocą odbiornika kierunkowego namierza radiolatarnię na brzegu, albo zespół radiolatarni kierunkowych na lądzie namierza sygnały statku. nadawane zwykłym nadajnikiem i podaje drogą radiową, jakie jest miejsce statku.
Dospecyficznie trudnych zagadnień na morzu należało prowadzenie nawigacji w czasie złej widoczności, szczególnie we mgle. Dotychczasowe sposoby określania miejsca polegały na obserwacji – albo znaków nawigacyjnych, albo ciał niebieskich. W czasie złej widoczności wszystkie te sposoby były nieużyteczne.
Wprowadzenie radionamierzania rozwiązywało w pewnej mierze ten problem, ale miało wady. Nie dawało mianowicie wystarczającej dokładności, gdyż oparte było na wyczuwaniu przez człowieka maksimum dźwięku. Ucho ludzkie jest tak niedokładnym instrumentem, że nie pozwala dobrze uchwycić tego momentu.
Na szczęście duch wynalazczy nie zna spokoju.
Radionawigację rozwijano dalej. Wynaleziono sposób określenia miejsca przy użyciu fal radiowych – zwany „Gee” (dżi) i później „Decca”. Sposób ten wymaga specjalnej mapy z naniesioną siatką hyperboliczną. Wykorzystano tu inną cechę fal radiowych, a mianowicie tę, że rozchodzą się one z szybkością stałą wynoszącą, jak wiemy, 300 000 km/sek.
Wsystemie „Gee“ dwie pary stacji radiowych wysyłają jednocześnie impulsy. W zależności od tego, jak daleko znajdu¬jemy się od stacji A i jak daleko od stacji B (mówimy o jednej z par stacji), wysłane przez stacje impulsy dotrą do nas z pewną różnicą czasu. Jeśli jesteśmy bliżej stacji A, to odbierzemy jej impuls wcześniej niż stacji B. Zauważono, że punkty, w których znajdując się, odbieramy impulsy z taką samą różnicą czasu, układają się wzdłuż linii krzywych zwanych hiperbolami. Hiperbole te wykreślono na mapie i powstała w ten sposób siatka hiperboliczna. Oznaczono także, jakiej różnicy czasu odpowiada każda krzywa.
Należało jeszcze zbudować taki odbiornik, który byłby zdolny mierzyć różnice czasu, wynoszące ułamki sekundy. Odbiornik taki zbudowano. Miejsce więc określa się systemem „Gee“ w ten sposób, że dobieramy sygnały dwu par stacji nadawczych i mierzymy różnicę czasu w poszczególnych parach stacji. Szukamy na mapie, którym hiperbolom te różnice czasu odpowiadają. Na przecięciu dwóch wyszukanych hiperbol jest nasze położenie geograficzne.
System „Decca” jest ulepszonym systemem „Gee”. Hiperbole w tym wypadku oznaczają miejsca jednakowych różnic faz między falami radiowymi o tej samej długości, nadawanymi jednocześnie przez dwie stacje nadawcze. Mamy więc możność określenia swego położenia geograficznego niezależnie od widoczności. Określenie miejsca to jednak nie wszystko. Nawigacja musi być bezpieczna. Nie możemy dopuszczać, aby narazić na niebezpieczeństwo życie ludzkie czy cenny ładunek.
Jakomijać przeszkody nawigacyjne podczas mgły, czy złej widoczności? Pytanie to nurtowało nieraz umysły wynalazców. Trzeba zobaczyć przeszkody, pomimo złej widoczności. Po żmudnej pracy wybitnych techników osiągnięto pozytywne rezultaty. Narodził się „RADAR”. I w tym wypadku zaprzęgnięto do pracy dla dobra człowieka fale elektromagnetyczne. Oprócz znanych nam już ich właściwości rozchodzenia się z szybkością stałą 300 000 km/sek. i możności wysyłania ich i odbierania kierunkowo, wykorzystano tę właściwość. że fale o małej długości, napotykając na przeszkody w postaci przedmiotów czy po prostu innych „ośrodków”, odbijają się. Można je po odbiciu odebrać.
Zbudowano więc urządzenie radiowe, które wysyła snop fal elektromagnetycznych w pożądanym kierunku i odbiera ich odbicia od przeszkód, stojących im na drodze. Z różnicy czasu między wysłaniem i odebraniem impulsu i szybkości rozchodzenia się fal otrzymujemy odległość napotkanego przedmiotu. System kierunkowego odbioru pozwala nam określić jego położenie w stosunku do okrętu czy też kursu.
Zasada jest, jak widzimy, prosta. Trudniej było rozwiązać ją technicznie. Najwięcej trudności sprawiało zbudowanie przyrządu, mogącego mierzyć różnice czasu, wynoszące ułamki sekundy, jak na przykład 0,0005 sekundy. Uporano się jednak z trudnościami. Otrzymaliśmy cudowne oko, które widzi w ciemności i we mgle, i to na większą odległość, bo od dziesiątków metrów do setek kilometrów. Wynalazek jest bezwarunkowo doskonały, lecz mimo to nie przeceniajmy go jednak.
Niezapominajmy, że nasze poczciwe i zasłużone weterany morskie: – kompas, mapa morska i log, nie przestały być podstawą do prowadzenia nawigacji. Wiele jeszcze lat upłynie, zanim opisane tu pokrótce ulepszenia zajmą miejsce na wszystkich okrętach i statkach. Wielu jeszcze niespokojnych żeglarzy będzie wypatrywać chowających się figlarnie za chmurami ciał niebieskich, czy mrugających latarni morskich, aby odpowiedzieć na dręczące ich pytanie – gdzie ja w tej chwili jestem?
KPT. MAR. JÓZEF GÓRNY